《高中物理 第四章 電磁感應(yīng) 5 電磁感應(yīng)現(xiàn)象的兩類情況分層訓(xùn)練 新人教版選修32》由會(huì)員分享��,可在線閱讀���,更多相關(guān)《高中物理 第四章 電磁感應(yīng) 5 電磁感應(yīng)現(xiàn)象的兩類情況分層訓(xùn)練 新人教版選修32(7頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索�。
1���、
5 電磁感應(yīng)現(xiàn)象的兩類情況
A級(jí) 抓基礎(chǔ)
1.(多選)下列說(shuō)法中正確的是( )
A.動(dòng)生電動(dòng)勢(shì)的產(chǎn)生與洛倫茲力有關(guān)
B.因?yàn)槁鍌惼澚?duì)運(yùn)動(dòng)電荷始終不做功�����,所以動(dòng)生電動(dòng)勢(shì)的產(chǎn)生與洛倫茲力無(wú)關(guān)
C.動(dòng)生電動(dòng)勢(shì)的方向可以由右手定則來(lái)判定
D.導(dǎo)體棒切割磁感線產(chǎn)生感應(yīng)電流���,受到的安培力一定與受到的外力大小相等、方向相反
解析:由動(dòng)生電動(dòng)勢(shì)產(chǎn)生原因知A����、C正確����,B錯(cuò)誤�����;只有在導(dǎo)體棒做勻速切割時(shí)����,除安培力以外的力的合力才與安培力大小相等、方向相反���,做變速運(yùn)動(dòng)時(shí)不成立,故D錯(cuò)誤.
答案:AC
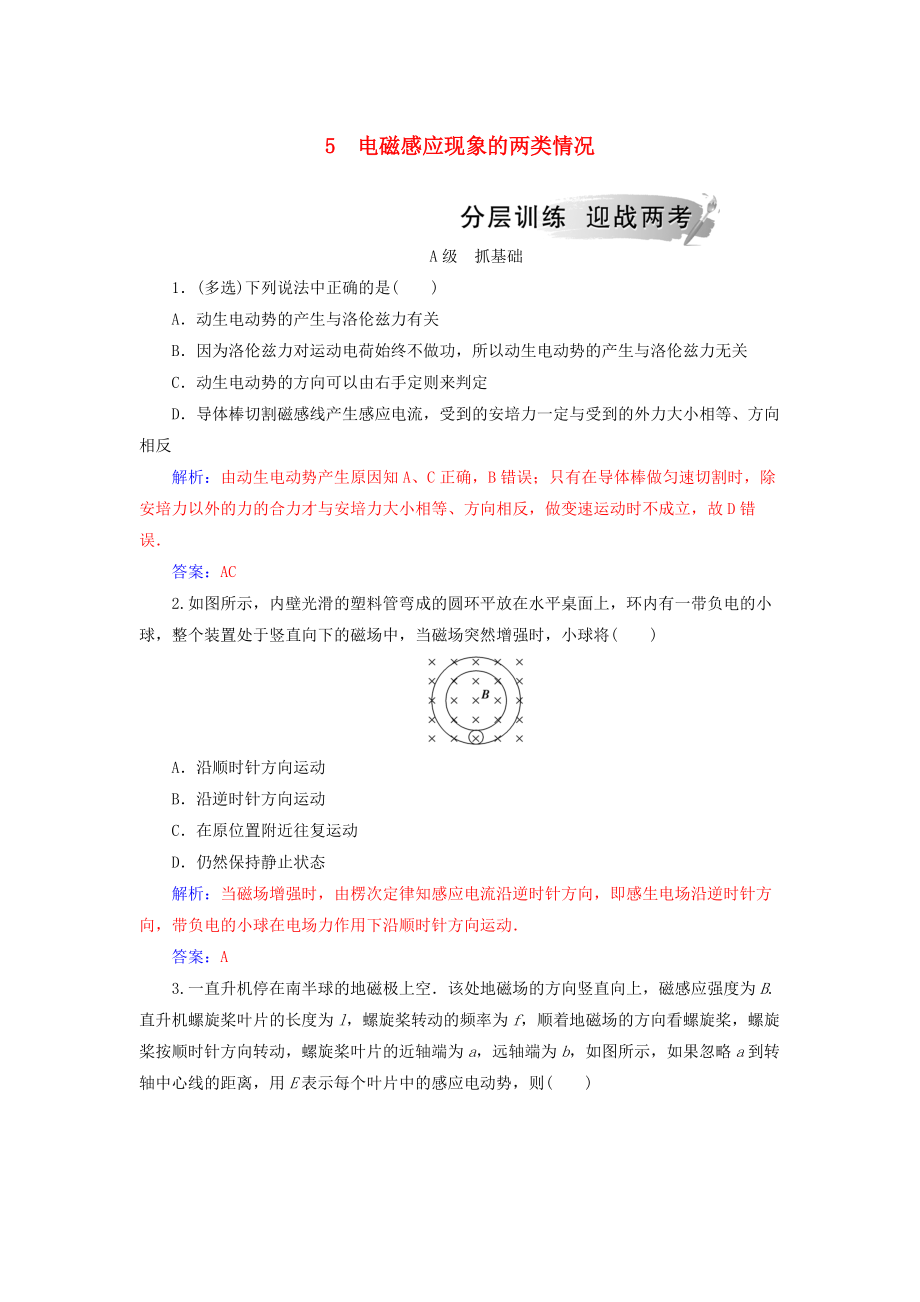
2.如圖所示����,內(nèi)壁光滑的塑料管彎成的圓環(huán)平放在水平桌面上,環(huán)內(nèi)有一帶負(fù)電的小球����,整個(gè)裝
2、置處于豎直向下的磁場(chǎng)中�����,當(dāng)磁場(chǎng)突然增強(qiáng)時(shí),小球?qū)? )
A.沿順時(shí)針?lè)较蜻\(yùn)動(dòng)
B.沿逆時(shí)針?lè)较蜻\(yùn)動(dòng)
C.在原位置附近往復(fù)運(yùn)動(dòng)
D.仍然保持靜止?fàn)顟B(tài)
解析:當(dāng)磁場(chǎng)增強(qiáng)時(shí)�,由楞次定律知感應(yīng)電流沿逆時(shí)針?lè)较颍锤猩妶?chǎng)沿逆時(shí)針?lè)较?�,帶?fù)電的小球在電場(chǎng)力作用下沿順時(shí)針?lè)较蜻\(yùn)動(dòng).
答案:A
3.一直升機(jī)停在南半球的地磁極上空.該處地磁場(chǎng)的方向豎直向上����,磁感應(yīng)強(qiáng)度為B.直升機(jī)螺旋槳葉片的長(zhǎng)度為l,螺旋槳轉(zhuǎn)動(dòng)的頻率為f�,順著地磁場(chǎng)的方向看螺旋槳,螺旋槳按順時(shí)針?lè)较蜣D(zhuǎn)動(dòng)���,螺旋槳葉片的近軸端為a��,遠(yuǎn)軸端為b����,如圖所示�,如果忽略a到轉(zhuǎn)軸中心線的距離,用E表示每個(gè)葉片中的感應(yīng)電動(dòng)勢(shì)�����,則( )
3、
A.E=πfl2B���,且a點(diǎn)電勢(shì)低于b點(diǎn)電勢(shì)
B.E=2πfl2B�����,且a點(diǎn)電勢(shì)低于b點(diǎn)電勢(shì)
C.E=πfl2B���,且a點(diǎn)電勢(shì)高于b點(diǎn)電勢(shì)
D.E=2πfl2B,且a點(diǎn)電勢(shì)高于b點(diǎn)電勢(shì)
解析:解這道題要考慮兩個(gè)問(wèn)題:一是感應(yīng)電動(dòng)勢(shì)大小��,E=Blv=Bl2πf=Bl2πf����;二是感應(yīng)電動(dòng)勢(shì)的方向,由右手定則可以判斷出感應(yīng)電動(dòng)勢(shì)的方向是由a→b�����,因此a點(diǎn)電勢(shì)低.
答案:A
4.如圖所示���,矩形線框abcd的ad和bc的中點(diǎn)M、N之間連接一電壓表����,整個(gè)裝置處于勻強(qiáng)磁場(chǎng)中��,磁場(chǎng)的方向與線框平面垂直���,當(dāng)線框向右勻速平動(dòng)時(shí),下列說(shuō)法中正確的是( )
A.穿過(guò)線框的磁通量不變化���,MN間無(wú)感應(yīng)
4�、電動(dòng)勢(shì)
B.MN這段導(dǎo)體做切割磁感線運(yùn)動(dòng)���,MN間有電勢(shì)差
C.MN間有電勢(shì)差�����,所以電壓表有示數(shù)
D.因?yàn)橛须娏魍ㄟ^(guò)電壓表��,所以電壓表有示數(shù)
解析:穿過(guò)線框的磁通量不變化�����,線框中無(wú)感應(yīng)電流��,但ab�����、MN�、dc都切割磁感線,它們都有感應(yīng)電動(dòng)勢(shì)�,故A錯(cuò),B對(duì)�;無(wú)電流通過(guò)電壓表,電壓表無(wú)示數(shù)�����,C�����、D錯(cuò).
答案:B
5.(多選)如圖所示��,空間有一個(gè)方向水平的有界勻強(qiáng)磁場(chǎng)區(qū)域���,一矩形導(dǎo)線框自磁場(chǎng)上方某一高度處自由下落.進(jìn)入磁場(chǎng)的過(guò)程中,導(dǎo)線框平面與磁場(chǎng)方向垂直�,則在導(dǎo)線框進(jìn)入磁場(chǎng)的過(guò)程中可能( )
A.變加速下落 B.變減速下落
C.勻速下落 D.勻加速下落
解析:當(dāng)線
5、框進(jìn)入磁場(chǎng)時(shí)��,ab邊切割磁感線產(chǎn)生感應(yīng)電動(dòng)勢(shì),回路中有感應(yīng)電流�,所以ab邊受到的安培力向上.當(dāng)F安==mg時(shí),線框勻速進(jìn)入磁場(chǎng)���;當(dāng)F安=<mg時(shí)����,則變加速進(jìn)入磁場(chǎng)���;當(dāng)F安=>mg時(shí)���,則變減速進(jìn)入磁場(chǎng),故A���、B��、C正確��,D錯(cuò)誤.
答案:ABC
6.如圖所示�,在豎直平面內(nèi)有兩根平行金屬導(dǎo)軌�����,上端與電阻R相連,磁感應(yīng)強(qiáng)度為B的勻強(qiáng)磁場(chǎng)垂直導(dǎo)軌平面.一質(zhì)量為m的金屬棒以初速度v0沿導(dǎo)軌豎直向上運(yùn)動(dòng)�����,上升到某一高度后又返回到原處�����,整個(gè)過(guò)程金屬棒與導(dǎo)軌接觸良好���,導(dǎo)軌與棒的電阻不計(jì).下列說(shuō)法正確的是( )
A.回到出發(fā)點(diǎn)的速度v大于初速度v0
B.通過(guò)R的最大電流����,上升過(guò)程小于下落過(guò)程
C.
6�����、電阻R上產(chǎn)生的熱量�����,上升過(guò)程大于下落過(guò)程
D.所用時(shí)間上升過(guò)程大于下落過(guò)程
解析:金屬棒切割磁感線運(yùn)動(dòng)�����,由右手定則和法拉第電磁感應(yīng)定律����、安培力公式可知金屬棒下行和上行時(shí)的受力情況,由能量守恒定律可知�����,金屬棒在運(yùn)動(dòng)過(guò)程中��,機(jī)械能不斷轉(zhuǎn)化為熱能��,所以回到出發(fā)點(diǎn)的速度v小于初速度v0����,選項(xiàng)A錯(cuò)誤;設(shè)金屬棒運(yùn)動(dòng)的速度為v��,長(zhǎng)度為l���,那么感應(yīng)電動(dòng)勢(shì)E=Blv���,通過(guò)R的電流I==����,可見(jiàn)�����,當(dāng)金屬棒運(yùn)動(dòng)速度v大時(shí)����,通過(guò)R的電流大,因?yàn)榻饘侔粼谶\(yùn)動(dòng)過(guò)程中�����,機(jī)械能不斷轉(zhuǎn)化為熱能���,所以運(yùn)動(dòng)到同一高度處���,上升時(shí)的速度大于下降時(shí)的速度,所以通過(guò)R的最大電流上升過(guò)程大于下落過(guò)程�,選項(xiàng)B錯(cuò)誤;同一高度處金屬棒上升時(shí)受到
7�、的安培力大于下降時(shí)受到的安培力,由于上升和下降的高度相同�����,所以上升過(guò)程克服安培力所做的功大于下降時(shí)克服安培力做的功,故電阻R上產(chǎn)生的熱量上升過(guò)程大于下落過(guò)程�,C正確;研究金屬棒的上升過(guò)程時(shí)��,可以采取逆向思維法�,把上升過(guò)程看作金屬棒從最高點(diǎn)自由下落��,顯然���,下落的加速度a1>g>a2�,其中a2為金屬棒返回下落時(shí)的加速度�,顯然,下落相同高度��,t1<t2���,選項(xiàng)D錯(cuò)誤.
答案:C
B級(jí) 提能力
7.如圖����,MN和PQ是電阻不計(jì)的平行金屬導(dǎo)軌��,其間距為L(zhǎng),導(dǎo)軌彎曲部分光滑����,平直部分粗糙,右端接一個(gè)阻值為R的定值電阻.平直部分導(dǎo)軌左邊區(qū)域有寬度為d�����、方向豎直向上��、磁感應(yīng)強(qiáng)度大小為B的勻強(qiáng)磁場(chǎng).質(zhì)量為m
8��、���、電阻也為R的金屬棒從高度為h處?kù)o止釋放���,到達(dá)磁場(chǎng)右邊界處恰好停止.已知金屬棒與平直部分導(dǎo)軌間的動(dòng)摩擦因數(shù)為μ,金屬棒與導(dǎo)軌間接觸良好����,則金屬棒穿過(guò)磁場(chǎng)區(qū)域的過(guò)程中( )
A.流過(guò)金屬棒的最大電流為
B.通過(guò)金屬棒的電荷量為
C.克服安培力所做的功為mgh
D.金屬棒產(chǎn)生的焦耳熱為mg(h-μd)
解析:金屬棒滑下過(guò)程中,根據(jù)動(dòng)能定理有mgh=mv���,根據(jù)法拉第電磁感應(yīng)定律有Em=BLvm�,根據(jù)閉合電路歐姆定律有Im=,聯(lián)立得Im=�����,A錯(cuò)誤�;根據(jù)q=可知,通過(guò)金屬棒的電荷量為��,B錯(cuò)誤�����;金屬棒運(yùn)動(dòng)的全過(guò)程根據(jù)動(dòng)能定理得mgh+Wf+W安=0�,所以克服安培力做的功小于mgh����,故C錯(cuò)誤
9、��;由Wf=-μmgd��,金屬棒克服安培力做的功完全轉(zhuǎn)化成電熱���,由題意可知金屬棒與電阻R上產(chǎn)生的焦耳熱相同���,設(shè)金屬棒上產(chǎn)生的焦耳熱為Q�����,故2Q=-W安�,聯(lián)立得Q=mg(h-μd)�,D正確.
答案:D
8.如圖所示,L1=0.5 m����,L2=0.8 m,回路總電阻為R=0.2 Ω��,M=0.04 kg����,導(dǎo)軌光滑,開(kāi)始時(shí)磁場(chǎng)B0=1 T����,現(xiàn)使磁感應(yīng)強(qiáng)度以=0.2 T/s的變化率均勻地增大,試求:當(dāng)t為多少時(shí)����,M剛離開(kāi)地面(g取10 m/s2)?
解析:回路中原磁場(chǎng)方向向下���,且磁通量增加,由楞次定律可以判知��,感應(yīng)電流的磁場(chǎng)方向向上����,根據(jù)安培定則可以判知,ab中的感應(yīng)電流的方向是a→b�����,由左手定則可
10�����、知���,ab所受安培力的方向水平向左,從而向上拉起重物��,
設(shè)ab中電流為I時(shí)M剛好離開(kāi)地面�,此時(shí)有
FB=BIL1=Mg,①
I=,②
E==L1L2=0.08(V)���,③
B=�,④
聯(lián)立①②③④����,解得:
FB=0.4 N,I=0.4 A�����,B=2 T���,t=5 s.
9.如圖所示����,MN��、PQ為水平放置的足夠長(zhǎng)的平行光滑導(dǎo)軌�,導(dǎo)軌間距l(xiāng)=0.5 m,導(dǎo)軌左端連接一個(gè)R=0.2 Ω的電阻和一個(gè)理想電流表A��,導(dǎo)軌的電阻不計(jì)�,整個(gè)裝置放在磁感應(yīng)強(qiáng)度B=1 T的有界勻強(qiáng)磁場(chǎng)中,磁場(chǎng)方向垂直于導(dǎo)軌平面向下.一根質(zhì)量m=0.4 kg、電阻r=0.05 Ω的金屬棒與磁場(chǎng)的左邊界cd重合.現(xiàn)對(duì)金屬棒施加
11���、一水平向右�、大小為0.4 N的恒定拉力F�,使棒從靜止開(kāi)始向右運(yùn)動(dòng),已知在金屬棒離開(kāi)磁場(chǎng)右邊界ef前電流表的示數(shù)已保持穩(wěn)定.
(1)求金屬棒離開(kāi)磁場(chǎng)右邊界ef時(shí)的速度大?�?��;
(2)當(dāng)拉力F的功率為0.08 W時(shí)��,求金屬棒的加速度.
解析:(1)由題意可知��,當(dāng)金屬棒離開(kāi)右邊界ef時(shí)已達(dá)到最大速度vmax�����,E=Blvmax,
I=��,
F安=BIl�,
F安=F,
代入數(shù)據(jù)得vmax=0.4 m/s.
(2)當(dāng)力F的功率為0.08 W時(shí)�,金屬棒的速度
v==0.2 m/s,
F-F安′=ma,即F-=ma�����,
代入數(shù)據(jù)得a=0.5 m/s2�����,方向向右.
10.如圖甲所示���,一對(duì)平
12�、行光滑軌道放置在水平面上�,兩軌道間距l(xiāng)=0.20 m,電阻R=1.0 Ω����;有一導(dǎo)體桿靜止地放在軌道上,與兩軌道垂直�����,桿及軌道的電阻皆可忽略不計(jì)�,整個(gè)裝置處于磁感應(yīng)強(qiáng)度B=0.5 T的勻強(qiáng)磁場(chǎng)中,磁場(chǎng)方向垂直軌道向下�����,現(xiàn)用一外力F沿軌道方向拉桿,使之做勻加速運(yùn)動(dòng)����,測(cè)得力F與時(shí)間t的關(guān)系如圖乙所示.求桿的加速度a和質(zhì)量m.
解析:導(dǎo)體桿在軌道上做初速度為零的勻加速直線運(yùn)動(dòng),用v表示瞬時(shí)速度���,t表示時(shí)間�,則桿切割磁感線產(chǎn)生的感應(yīng)電動(dòng)勢(shì)為
E=Blv=Blat���,①
閉合回路中的感應(yīng)電流為:
I=�����,②
由安培力公式和牛頓第二定律得:
F-IlB=ma���,③
將①②式代入③式整理得:
F
13、=ma+at.④
在乙圖象上取兩點(diǎn)t1=0��,F(xiàn)1=1 N���;t2=30 s��,F(xiàn)2=4 N代入④式����,聯(lián)立方程解得
a=10 m/s2��,m=0.1 kg.
11.如圖所示�,電動(dòng)機(jī)牽引一根原來(lái)靜止的、長(zhǎng)為L(zhǎng)=1 m�、質(zhì)量為m=0.1 kg的導(dǎo)體MN,其電阻R=1 Ω��,導(dǎo)體棒架在磁感應(yīng)強(qiáng)度B=1 T���、豎直放置的框架上�����,當(dāng)導(dǎo)體棒上升h=3.8 m時(shí)獲得穩(wěn)定的速度�,導(dǎo)體產(chǎn)生的熱量為14 J��,電動(dòng)機(jī)牽引棒時(shí)�,電壓表、電流表的示數(shù)分別為7 V�����、1 A,電動(dòng)機(jī)內(nèi)阻r=1 Ω�����,不計(jì)框架電阻及一切摩擦���,g取10 m/s2���,求:
(1)棒能達(dá)到的穩(wěn)定速度;
(2)棒從靜止至達(dá)到穩(wěn)定速度所需要的時(shí)間.
解
14�����、析:(1)電動(dòng)機(jī)的輸出功率P出=IU-Ir2=6 W����,
棒達(dá)到穩(wěn)定速度時(shí),有:F=mg+BIL=mg+����,
而電動(dòng)機(jī)的輸出功率P出=Fvm,
由以上各式解得vm=2 m/s.
(2)從棒開(kāi)始運(yùn)動(dòng)至達(dá)到穩(wěn)定速度的過(guò)程中,
由能量守恒定律���,有:P出t=mgh+mv+Q,
解得完成此過(guò)程所需要的時(shí)間t=3 s.
6EDBC3191F2351DD815FF33D4435F3756EDBC3191F2351DD815FF33D4435F3756EDBC3191F2351DD815FF33D4435F3756EDBC3191F2351DD815FF33D4435F3756EDBC3191F2351DD815FF33D4435F3756EDBC3191F2351DD815FF33D4435F375
 高中物理 第四章 電磁感應(yīng) 5 電磁感應(yīng)現(xiàn)象的兩類情況分層訓(xùn)練 新人教版選修32
高中物理 第四章 電磁感應(yīng) 5 電磁感應(yīng)現(xiàn)象的兩類情況分層訓(xùn)練 新人教版選修32